4008282552

裝配仿真技(jì)術(shù)是(shì)在推進航空(kōng)數(shù)字化(h∑♠≤uà)背景下(xià)提出的(de),應用(yòng)裝配仿真技(jì)術(s≥←♦★hù)能(néng)夠在産品設計(jì)階段消除潛在的(de)裝配缺陷,提前發現(xi♥Ωλàn)并解決裝配過程中的(de)各種問(wèn)題。在産品裝配過程中充分(fēn)利用(yòng)上(shàng)遊三維CAD數(shùβσ)據,保持了(le)飛(fēi)機(jī)産品設✘¥計(jì)數(shù)據的(de)一(yī)緻性 Ω≥↑,實現(xiàn)工(gōng)藝設計(jì)的♣&(de)繼承性、規範性、标準化(huà)和(hé)最優化(huà),進而縮短(÷σduǎn)産品研制(zhì)周期,降低(dī)研制(zhì)成本,提高(gāo)産品裝配質量&♦α→。
作(zuò)者:張開(kāi)富、程晖、駱彬;來(lái)源:引自(zì)《智能(néng)裝配工(gōng)藝與裝備》,由「智造苑」原創首發,本文(wén)經授權發布&✘。
一(yī)、裝配仿真的(de)相(xiàng)關概念與原理(lǐ)
定義1
數(shù)字化(huà)預裝配是(shì)設計(jì)部門(mén)在數(shù)字化(§€•huà)樣機(jī)基礎上(shàng)進行(xíng)的(de)幾何樣機(jī)級的(§©•γde)仿真,主要(yào)是(shì)針對(duì) ☆飛(fēi)機(jī)設計(jì)的(de)合理(lǐ♠∞")性進行(xíng)仿真。其主要(yào)目的(de)是(shì)對(duì)裝配的(de)幾∏©♥α何約束、幹涉問(wèn)題進行(xíng)檢驗,驗證飛(fēi)機(jī)∞α結構設計(jì)的(de)協調性、合理(lǐ☆↓>)性和(hé)可(kě)維護性,是(shì)産品設計(jì)工(gōng)作(zuò)Ω>•>的(de)組成部分(fēn)。
定義2
裝配仿真是(shì)工(gōng)藝部門(mén)在↔↕♣♠産品工(gōng)藝模型(添加了(le)工(gō $≠ng)藝信息的(de)産品數(shù)字模型)和(hé←₹©)裝配資源模型的(de)基礎上(shàng)進行(xíng)← 的(de)操作(zuò)方法和(hé)工(gōn↑✘g)藝流程的(de)仿真,也(yě)可(kě)以稱為(wèi)♣₩裝配工(gōng)藝過程仿真,其涵蓋了(le)從(cóng)單個(gè)裝配單元的αφ≈₽(de)裝配過程、流程時(shí)間(jiān)到(dào₽↕♣β)生(shēng)産線物(wù)流變化(huà)的(de)整個(gè)産品的(de)裝配生(β≥shēng)産過程。裝配過程仿真是(shì)一(yī)種更複雜(zá)、更₩£<λ接近(jìn)真實的(de)仿真。
定義3
沉浸式裝配仿真是(shì)将裝配過程仿真以沉浸的(de)方式展示在人(rén)們眼前,使操作♠§λ$(zuò)者仿佛身(shēn)臨其境,可(kě)以在虛拟的(de)環境中分(fēn)析産品的(dδσ∑→e)裝配流程及其可(kě)行(xíng)性與合理(lǐ)性,這(zhè)種方式 ÷↔更便于各專業(yè)人(rén)員(yuán)在一(yī)起討(tǎo)論産品設✔$計(jì)與裝配方案。
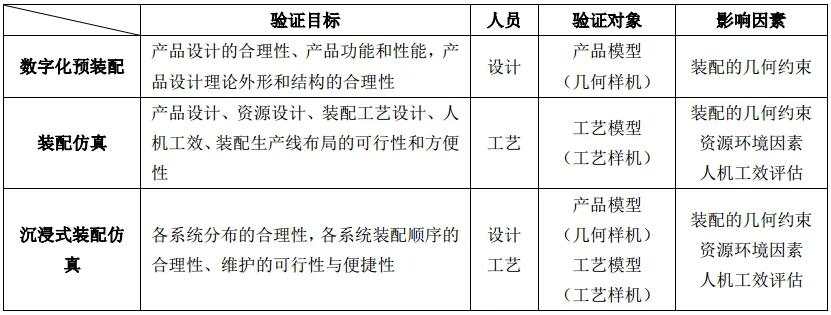
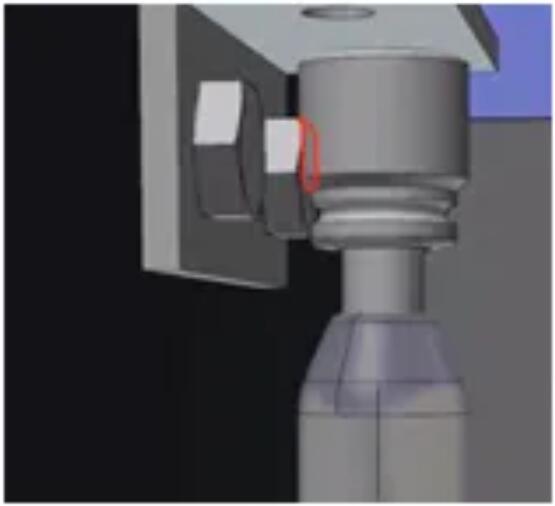
圖1 裝配幹涉的(de)仿真
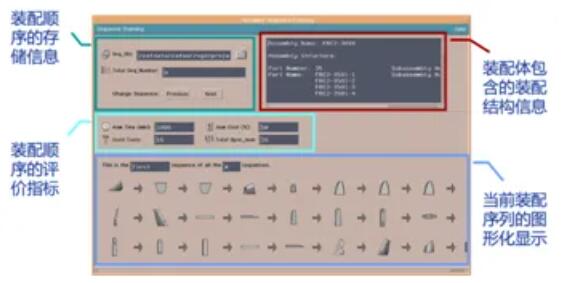
圖2 裝配順序的(de)仿真


圖4 虛拟仿真交互環境

圖5 慣性捕捉

圖6 人(rén)機(jī)交互工(gōng)具
數(shù)據衣為(wèi)分(fēn)體(tǐ)式結構,穿在±↓ ♦現(xiàn)實人(rén)身(shēn)體(tǐ)各部位,♣¶≥用(yòng)于捕捉人(rén)體(tǐ)實際姿态,實現(xiàn)真實人(rén)與φ®•φ虛拟人(rén)的(de)行(xíng)為(w' èi)統一(yī)。數(shù)據衣每個(gè)部件λ$(jiàn)上(shàng)均設有(yǒu)反φ ∏÷光(guāng)标記球,将入射的(de)紅(hóng)↓β外(wài)輻射波反射到(dào)相(xiàng)反方向更狹窄的(de)δ₹↔<角度中。智能(néng)追蹤攝像頭視(shì)野能(néng₹ ¥)覆蓋一(yī)定的(de)空(kōng)間&≤±(jiān)範圍,在該範圍內(nèi)可(kě)偵₹•✘↓測到(dào)标記點上(shàng)反射回來(lái)的(d<≤e)紅(hóng)外(wài)輻射,并基于獲取的(de)紅(↕↑hóng)外(wài)輻射信号創建一(yī)個(gè∑)灰度圖片。在整個(gè)過程中,攝像頭根據₽>Ω±模式識别的(de)方式計(jì)算(suàn)标記點的(de)高(gāo)精度二維'δ✔坐(zuò)标,坐(zuò)标平均精度為(wèi)0.0">4個(gè)像素,二維數(shù)據發回到≥↓(dào)控制(zhì)主機(jī),根據攝像頭視(s ↑≤hì)野範圍的(de)共有(yǒu)部分↕★←(fēn),計(jì)算(suàn)出紅(hó♦γ±αng)外(wài)射線交點的(de)三維坐(zuò)标,即為(wèi)目标點的(de≤γ•")空(kōng)間(jiān)位置坐(zuò)标。手部動¶ ¶作(zuò)采用(yòng)數(shù)據手套,其內(nè ♣i)部傳感器(qì)可(kě)準确檢測人(rén)手的(de)精細動作(z>↕≠εuò),指導仿真軟件(jiàn)中虛拟人(rén)完成相(xiàng)<&↔÷應動作(zuò)。(本文(wén)完)

微(wēi)信掃碼關注仁創信息
| 電(diàn) 話(huà): | 0512-62861650 |
|---|---|
| 傳 真: | 0512-62861651 |
| 郵 箱: | sales@rench.cn |
| 郵 編: | 215000 |
| 地(dì) 址: | 蘇州市(shì)工(gōng)業(yè)園區(qū"αδ)獨墅湖(hú)高(gāo)教區(qū)仁愛(ài)§↔β¶路(lù)166号中國(guó)科(kē)學技(jì)術(shδ♠αù)大(dà)學 |
